
视频加载中...
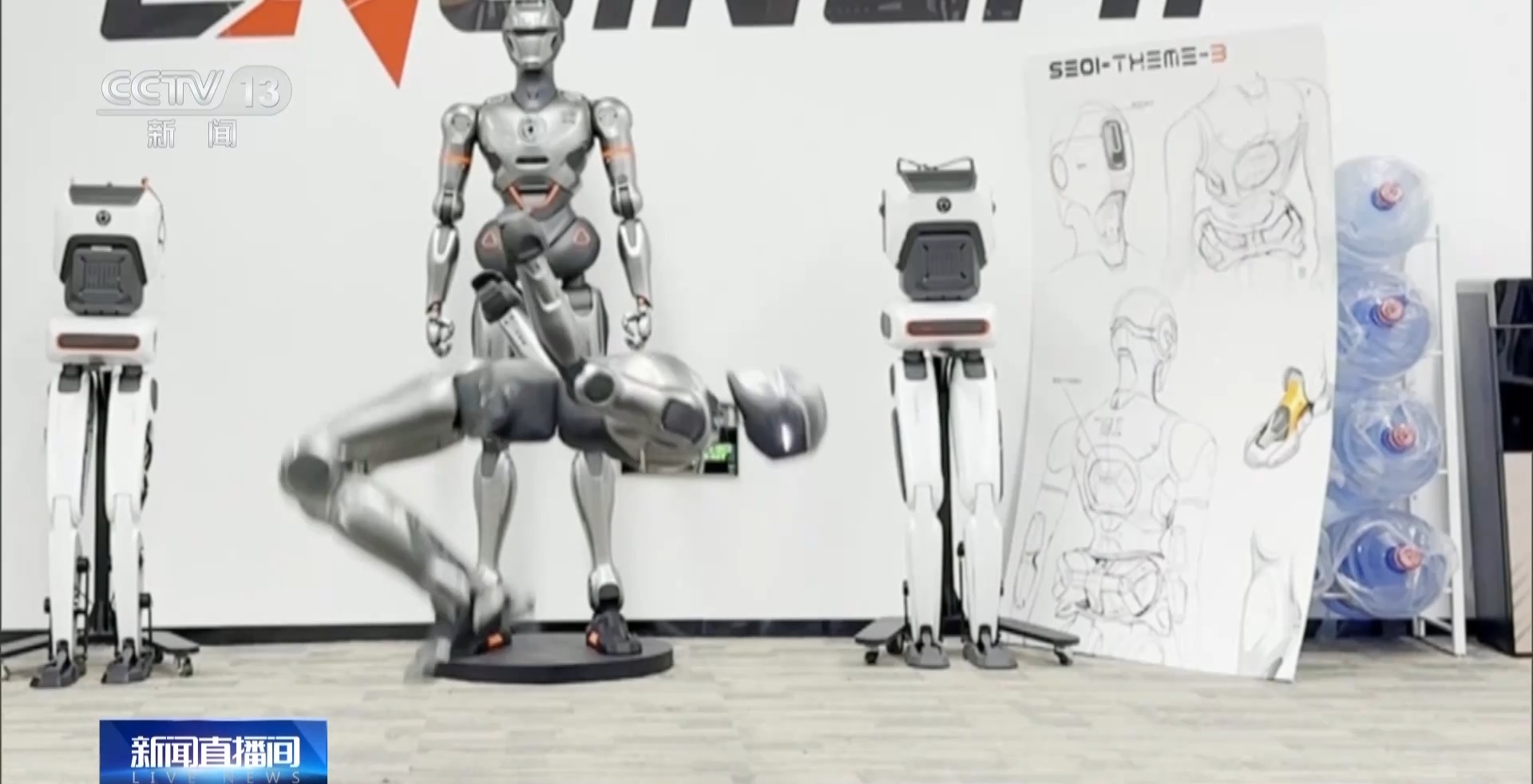
随着人工智能、传感器技术等的快速发展,人形机器人的研究取得显著进展,已经可以完成行走、奔跑等动作。近日,深圳的一家机器人公司研制的人形机器人,则完成了难度更大的动作:前空翻。
机器人的这个前空翻动作,完成得干净利落。

再来一次,落地后,机器人还能前行两步,调节身体的稳定性,这对于机器人来说则是更高的要求。那么,机器人是如何完成这一动作的呢?
科研人员告诉记者,要完成前空翻的动作,控制机器人的重量和机器人全身关节的爆发力非常重要。

深圳市某机器人科技有限公司联合创始人 李海雷:在机器人行业,整机的重量是对整机性能影响最重要的一个参数。你只有把整机重量做得轻了,同时关节爆发力做得更高,才能完成这种极限的动作。
能完成前空翻动作,展示了机器人在运动控制、平稳能力和机械设计方面的高度复杂性,也需要更加复杂的算法支撑。

深圳市某机器人科技有限公司联合创始人 李海雷:我们得益于所有的关节都有自研的能力,这样在整机上我们能把整机的重量控到极致,你只有把类似推重比做到极致,才能带动更高的机器人运动性能。

凭着自主研发的硬实力,公司科研人员先是用了4个月的时间,改变了人形机器人长期以来只能以弯腿屈膝小碎步行走的形态,让人形机器人能够以优雅直膝的步态行走。然后只用了半个月的时间,他们就让机器人拥有了前空翻的能力。
下一步,科研人员还将在提升机器人的奔跑速度和跳跃能力等方面继续发力。

深圳市某机器人科技有限公司总裁 赵同阳:体能今年我们就要把它做到极致,再把智能在今年下半年开始逐渐去加入,当体能和智能都能进行突破的时候,机器人应用就会非常广。

当前,深圳机器人产业已崭露头角,全市已汇聚人工智能企业2600余家、独角兽企业6家,机器人上市企业34家、独角兽企业9家,创新活力持续迸发。
来源:央视新闻
- 随机文章
- 热门文章
- 热评文章
- 成都双流四小将亮相中超2025赛季
- 封面评论多城试水空置房物业费打折,也是一种以价换量今日
- 【期刊导读】荟萃分析:低病毒血症显著增加代偿期乙肝肝硬化患
- 林诗栋、孙颖莎领跑国际乒联世界排名
- 网店从银行网点附近挖取的泥土被附会五行属性,有店铺号称银行
- 是真的!去年奖金分红8亿元,494名员工收入超100万元!充电宝公
- 北京警方拘留1名男子:抽了根烟,然后悲剧了
- 极目政情退休近4年,60后张奇被查
转载请注明来自知行看点,本文标题:《人形机器人做前空翻难在哪?》












 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号